2021年11月8日に、NVIDIAから次期Jetsonシリーズ「Orin」が正式発表されました。
NVIDIA Jetsonは、Raspberry Pi のようなシングルボードコンピュータ(SBC)であって、特にGPUまわりの演算機能が強化された計算モジュールです。
電子機器の組み込み計算デバイスとして、各種計算処理用途で使われているほか、Jetson XavierシリーズからはTensorコアが搭載されたためAIなどの機械学習・ディープラーニング目的で利用するケースも見られます。近年では画像処理による映像中の物体認識などが盛んにおこなわれており、こうした取り組みもJetsonシリーズの位置づけ・方向づけに一役買っているものと見られます。
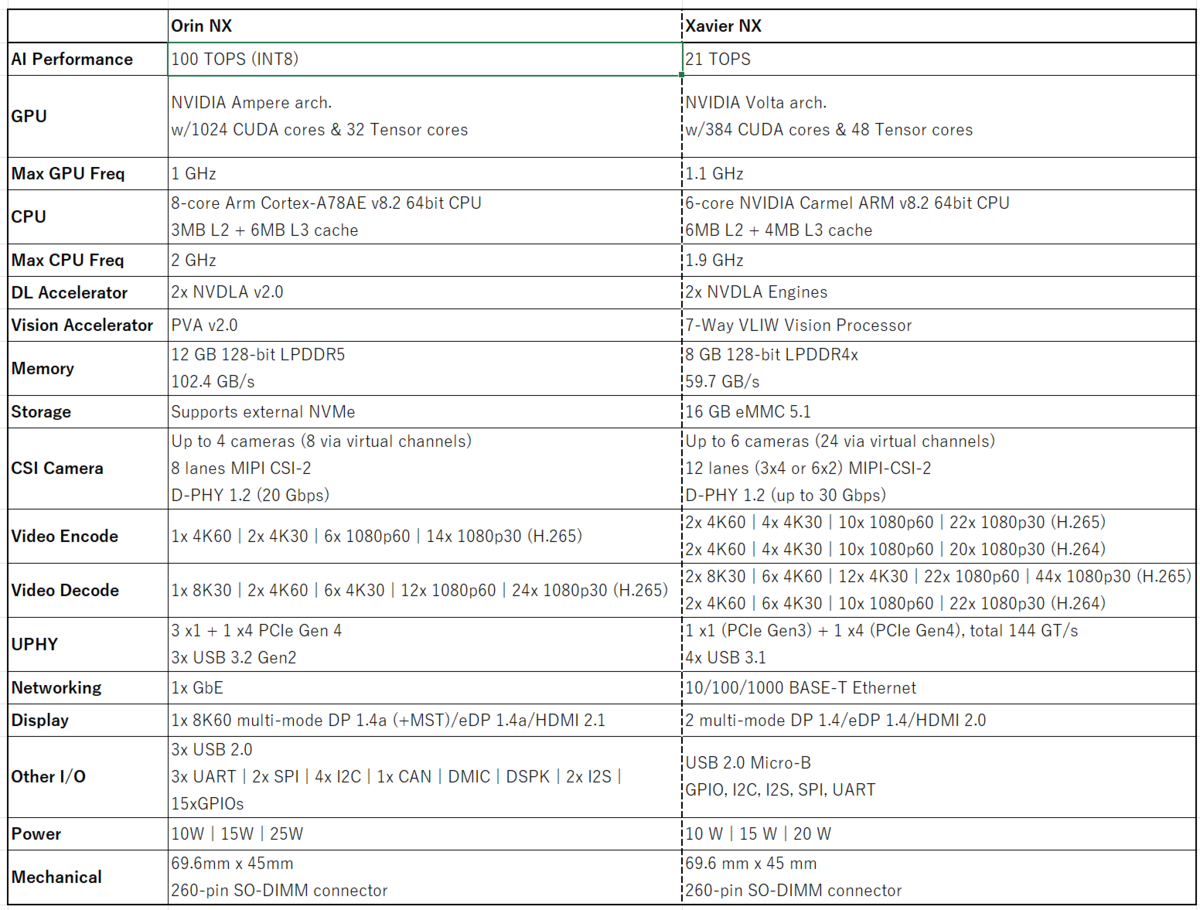
さて、前回のエントリーでは「Jetson Orin NX」と「Jetson Xavier NX」を比較しましたが、今回はそれらの上位モデル「Jetson AGX Orin」と「Jetson AGX Xavier」について触れてみたいと思います。
なお、Jetson AGX Orinについてはすでにプレビュー版のスペックシートが公開されているため、そちらで詳しく情報を得ることができます。※要ログイン
概要だけであればログイン無しで以下から参照できます。
Jetson Download Centerから、11月9日付でJetson AGX Orin Module Data Sheet や Product Design Guideなどが入手できるようになっています。ただし、いずれもプレビュー版であり今後の開発の状況によっては変更になる可能性が十分にあるため、参考程度にとどめるのがよいでしょう。
Jetson Orin NXに関する情報はまだ出ておらず、キャリアボードの形状も不明であることから、どんな機能が盛り込まれるか、仕様をどの程度におさめるかがまだ公表できるほど定まっていないようです。
しかし、JetPack 5.0やOrinアーキテクチャそのものに関する部分は現行Xavierシリーズや全容が定かではないOrin NXにも通じるところがあるので、見ておいて損は無いかと思います。
以下、Jetson AGX OrinとAGX Xavierの公表されている主なスペックの比較表です。
| AGX Orin | AGX Xavier | |
| AI Performance | 200 TOPS (INT8) | 32 TOPS |
| GPU | NVIDIA Ampere arch. w/2048 CUDA cores & 64 Tensor cores |
NVIDIA Volta arch. w/512 CUDA cores & 64 Tensor cores |
| Max GPU Freq | 1 GHz | 1.37 GHz |
| CPU | 12-core Arm Cortex-A78AE v8.2 64bit CPU 3MB L2 + 6MB L3 cache |
8-core NVIDIA Carmel ARM v8.2 64bit CPU 8MB L2 + 4MB L3 cache |
| Max CPU Freq | 2 GHz | 2.26 GHz |
| DL Accelerator | 2x NVDLA v2.0 | 2x NVDLA |
| Vision Accelerator | PVA v2.0 | 2x 7-Way VLIW Vision Processor |
| Memory | 32 GB 256-bit LPDDR5 204.8 GB/s |
32 GB 256-bit LPDDR4x 136.5 GB/s |
| Storage | 64GB eMMC 5.1 | 32 GB eMMC 5.1 |
| CSI Camera | Up to 6 cameras (16 via virtual channels) 16 lanes MIPI CSI-2 D-PHY 1.2 (up to 40Gbps) | C-PHY 1.1 (up to 164Gbps) |
Up to 6 cameras (36 via virtual channels) 16 lanes MIPI CSI-2 | 8 lanes SLVS-EC D-PHY 1.2 (up to 40 Gbps) | C-PHY 1.1 (up to 62 Gbps) |
| Video Encode | 2x 4K60 | 4x 4K30 | 8x 1080p60 | 16x 1080p30 (H.265) | 4x 4K60 | 8x 4K30 | 16x 1080p60 | 32x 1080p30 (H.265) 30x1080p30 (H.264) |
| Video Decode | 1x 8K30 | 3x 4K60 | 6x 4K30 | 12x 1080p60| 24x 1080p30 (H.265) | 2x 8K30 | 6x 4K60 | 12x 4K30 | 26x 1080p60 | 52x 1080p30 (H.265) 30x 1080p30 (H.264) |
| UPHY | 2 x8 (or 1x8 + 2x4), 1 x4, 2 x1 (PCIe Gen4, Root Port & Endpoint) 3x USB 3.2 Single lane UFS |
8x PCIe Gen4 | 8x SLVS-EC 3x USB 3.1 Single Lane UFS |
| Networking | 1x GbE | 4x 10GbE | 10/100/1000 BASE-T Ethernet |
| Display | 1x 8K60 multi-mode DP 1.4a (+MST)/eDP 1.4a/HDMI 2.1 | Three multi-mode DP 1.2a/e DP 1.4/HDMI 2.0 a/b |
| Other I/O | 4x USB 2.0 4x UART, 3x SPI, 4x I2S, 8x I2C, 2x CAN, DMIC & DSPK, GPIOs |
USB 2.0 UART, SPI, CAN, I2C, I2S, DMIC & DSPK, GPIOs |
| Power | 15W | 30W | 50W | 10 W | 15 W | 30 W |
| Mechanical | 100mm x 87mm 699-pin Molex Mirror Mezz Connector Integrated Thermal Transfer Plate |
100mm x 87mm 699-pin connector Integrated Thermal Transfer Plate |
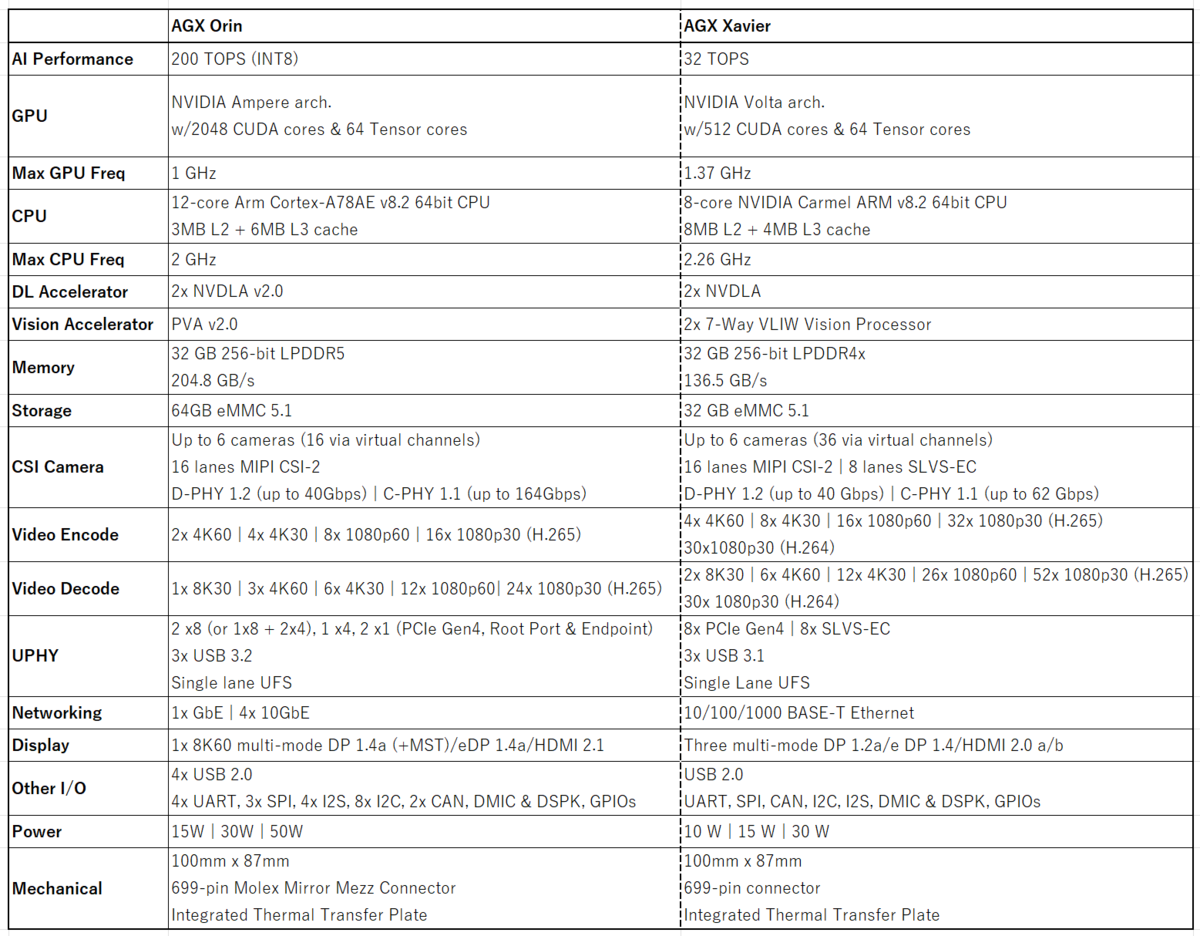
AGX Orinは、AGX Xavierと同じピン数とモジュールサイズになっています。
AIパフォーマンスはXavier比で6倍近くになるほか、CUDAコア数は4倍に増えており、比較的小さな計算モジュールなのにここにきて一気にPCのミドル~ハイグレードGPU並みのコア数を備えてきました。
CPUは12コアの計算ユニットを搭載し、メモリ帯域とあわせてXavierよりも強化されています。
また、Orin NXではXavier NXと比べて削られていたMIPI CSIカメラインタフェースも、AGX Orinに関しては据え置きという形になっています。
しかし、ハードウェアエンコーダの性能はXavier比で半減となっています。
その他際立っている点としては、ネットワークインターフェースに10ギガビットイーサネットが4系統追加されている点でしょうか。1ギガビット越えの有線LANインターフェースを備えた民生用PC周辺機器が手にしやすい価格になりつつあるので、この辺もだんだん標準装備になっていくのかもしれません。複数の通信系統があることで一種のハブのような形でシステム構築することもできそうです。
それから、今回表には載せていませんが、概要やスペックシートのPDFファイルに記載されているように、Orinはハードウェアエンコーダが「AV1」に対応しているみたいです。エンコード能力はH.265と同程度です。
一方で、Xavier搭載のハードウェアエンコーダでは行えたVP8やVP9のハードウェアエンコード機能は削除されているのか、記載されていません。デコードの方には記載があるのですが。
しかし、AV1はさすがにまだ早すぎと言いますか、デコードですらろくにできないデバイスの方が今は多いのではないかと思います。さすがにアルゴリズムも違うでしょうし、AV1に対応していればVP9にも対応しているということは無いでしょう。というか、やはり対応していれば記載しているところだと思いますし。
同じアーキテクチャを採用しているとすれば、Jetson Orin NXもAV1のハードウェアエンコードにH.265と同程度の性能で対応していると予想できますが、やはりVP8やVP9は削除されているのでしょう。
なので、Orinシリーズ全体をとおしてハードウェアエンコード性能は半減、AV1に対応するもVP8/VP9は削除されるということを念頭に置いたほうがよいでしょう。
仕様が現時点で公表できる程度にはまとまっていることもあってか、Orin NXは1年後の製品モジュールの販売開始とありましたが、AGX Orinは来年春頃(Q1 2022)には製品モジュールも開発者キットも利用できるようになるみたいです。
開発者キットの形はすでにウェブサイトに掲載されており、現行のJetson AGX Xavierと同等の外形・外観になりそうです。
耐衝撃性や広い温度範囲といった、産業向けに主に物理的な防御面で強化(計算能力はやや弱化)された「AGX Orin Industrial」については、AGX Orinより後になりますが販売される計画になっていたと思います。スペック差は現行のAGX Xavier と AGX Xavier Industrial の関係に近いのではないでしょうか。
全体的に性能が大きく向上し、コア数だけ見ても2000オーバーとかなりリッチな性能を備えており、ただの組み込み用SBCとだけみるにはもったいない代物のようです。
一方で、特にハードウェアエンコード・デコードまわりで機能が従来比で半減しており、NX/AGXのいずれについても言えることですが、やはり適材適所であって、従来モデルでやってきたことをそのままのせるというわけにはいかない用途もあるでしょう。
まだ半年かそれ以上は我々とは縁のないところにあるJetson Orinシリーズですが、エッジコンピューティングデバイスとして飛躍した計算機能を持つこれらが活躍する未来には、期待せずにはいられませんね(`・ω・´)